Introduction
This article refers to the address: http://
Automotive design has gone a long way from simple mechanical systems in the past to modern cars that often contain up to 100 microprocessors. The parts of the traditional car that use electronic devices are just those entertainment facilities, the most common being car radios. Electronic control of automotive functions began to become more prevalent until government regulations on various aspects of vehicle performance such as exhaust emissions and fuel economy were introduced. Initially, certain functions were performed using discrete hardware components or digital logic. With the advent of embedded processor solutions such as microcontrollers (MCUs), the benefits of using MCUs instead of fixed hardware are emerging, as designers can program MCUs to perform the specific tasks required by the modules. A wide variety of MCUs are used in automotive design, from the simplest 8-bit MCUs used to turn the windshield wiper and open the door to the complex 32-bit MCUs that control the engine. In the middle of this range are a large number of 16-bit MCUs that themselves offer considerable versatility in terms of computing power, memory capacity, power consumption, and peripheral characteristics. Choosing the right processor for each individual automotive subsystem and distributing the processing power between different subsystems plays a crucial role in the performance, reliability and enhancement of automotive products.
Digital Signal Controller: a leader in microcontrollers and digital signal processors
Most automotive control and monitoring operations require a lot of mathematical operations. For example, during the engine warm-up phase, the output data of the air flow (MAF) sensor and the engine tachometer (represented in revolutions per minute (RPM)) are sampled by the MCU, and then the required injection is calculated based on the measured value. The fuel quantity per cylinder is as follows:
F = MAF / (K*N*RPM/120)
Where K is the ideal (constant) air-to-fuel ratio for a given lubricant temperature and N is the number of cylinders.
The above calculations involve not only precise multiplication and division, but also the amount of fuel to be injected that is repeatedly calculated to accommodate rapidly changing engine operating conditions. Therefore, when the exhaust gas oxygen content (EGO) sensor is preheated enough to measure the mass of the exhaust gas, the output data of the EGO sensor must be continuously monitored to adjust the fuel injection rate to achieve optimum engine performance and reduce exhaust emissions. the amount.
Other examples of computationally intensive operations are:
a) Perform finite impulse response (FIR) or infinite impulse response (IIR) filtering on data from various sensors to eliminate noise. Application examples: engine knock detection, flameout detection or the effect of oil sloshing while continuously monitoring fuel level.
b) Perform a Fast Fourier Transform (FFT) to analyze the data to use the spectrum in subsequent processing stages. Application examples: Active vibration control or exhaust noise cancellation.
c) Scale, and normalize and linearize the sensor input data based on its magnitude.
d) Proportional-integral (PI) or proportional-integral-derivative (PID) control algorithms. Application example: Navigation control.
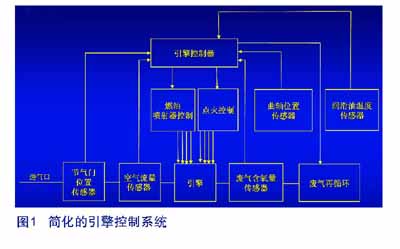
Figure 1 depicts a simplified engine control system that is itself part of the tasks performed by various processors in the car.
Comfort, diagnostics, and safety features such as cabin noise cancellation, engine knock detection, and anti-roll and stability control require more signal processing capabilities, which requires the use of mathematically intensive algorithms such as adaptive filtering.
Performing such calculations requires that the processor used has very high speed mathematical operations. 8-bit MCUs or general 16-bit MCU architectures do not have such functionality at all, and cost considerations often prevent expensive 32-bit MCUs from being used in such situations. A special processor architecture optimized for repetitive math processing - a 16-bit digital signal processor (DSP) can be used to perform such intensive tasks.
But in terms of the DSP itself (the relevant MCU that does not handle the control tasks), it is not very suitable for use in dynamic environments such as automotive systems. There are several main reasons:
a) DSP does not have a flexible interrupt structure.
b) The DSP cannot perform very efficient operations on bits (such as the state of individual I/O pins).
c) DSP relies heavily on off-chip memory and peripherals.
d) There are very few DSP devices with low pin counts and are therefore not suitable for use in space-constrained modules.
Therefore, the ideal single-chip architecture platform that can perform a large number of automotive functions will be a 16-bit digital signal controller (DSC), such as Microchip's dsPIC30F family of devices. The DSC is an innovative hybrid "system-on-a-chip" (SoC) architecture that seamlessly combines the control features of a 16-bit MCU with a large number of DSP functions.
On the one hand, the DSC architecture is especially suitable for typical control operations similar to the following:
a) Periodically provide interrupt service, for example, to obtain periodic sampling of vehicle speed and steering angle to calculate the brake pressure required for the anti-lock braking system (ABS).
b) Capturing data from multiple sensors and control inputs, for example, simultaneously measuring vehicle speed, acceleration, relative motion of the body and wheels, and steering angle to determine the braking level of the active suspension control system.
c) transmitting data and control pulses to the actuator, for example, transmitting a duty cycle variable PWM signal to switch the fuel injector or ignition circuit at a suitable cycle.
d) Sharing data with other controller modules in the distributed system, for example, various subsystems periodically send status data to the diagnostic module or user display panel.
On the other hand, the DSC's CPU supports a powerful set of DSP instructions and flexible addressing modes, so it can quickly complete a series of precise arithmetic and logic operations.
Main features of DSC
The typical DSC architecture has some CPU and peripheral features that make it suitable for many automotive applications. In this section, we will explore the most advantageous features of these features, which are the most interesting features when considering the use of the DSC architecture.
Enhanced CPU functionality
The most powerful feature of a 16-bit DSC may be its powerful mathematical processing power. A true DSC contains two 40-bit accumulators that can be used to store the results of two independent 16-bit × 16-bit multiply operations.
Most signal processing algorithms, as well as many general mathematical calculations, contain dynamic "product sum" calculations. Special instructions such as MAC (multiply-accumulate) can find two 16-bit products in one instruction cycle, add the result to the accumulator, and then prefetch a pair of data values ​​from RAM. Because there are two accumulators, this architecture can also perform calculations in another accumulator while writing back data to one accumulator.
A 40-bit wide accumulator allows data to temporarily overflow (this happens when a large number of values ​​are accumulated in the accumulator!). In addition, the DSC's CPU can choose to keep the value within an allowable range, which is determined by a mechanism called "saturation" that also rounds the data when writing back data to RAM. And adjustments. DSC also has the characteristics that MCUs usually do not have, that is, DSC has the ability to parse data in decimal form without always treating the data as an integer. This feature is useful for arithmetic operations of decimals.
In addition to the above features, the DSC architecture has multiple data addressing modes that efficiently transfer data, support circular buffers and bit-reversed addressing, and zero-overhead loops. Obviously, DSC provides a very efficient and user-friendly CPU architecture. The DSC is ideal for processing and analyzing sensor data, performing calculations related to controlling various actuators, and monitoring the performance of automotive systems.
Flexible interrupt structure
The interrupt structure of the DSC architecture is extremely flexible. Typically, a large number of interrupt sources and vectors that can be independently selected and prioritized are supported (useful for applications with multiple sensors and actuators!). The interrupt latency is highly deterministic and easy for system developers to design.
Runtime self programming (RTSP)
Most automotive applications require constants to be stored. These constants can be used to calibrate sensor output data based on environmental conditions, sensor type, and pre-measured offset. Post-processing algorithms also use constants such as filter coefficients, piston dimensions, and target air-fuel ratios, as well as predetermined system characteristic parameters, as well as error thresholds. Storing these constants in RAM wastes the capacity of the data store. DSC devices typically have flash program memory and flash data EEPROM that can be used to store and access these constants reliably and efficiently. In DSCs with flash memory, the user program can even modify these constants in real time based on changes in the environment, data or operating conditions. In many systems, it is also possible to use a serial communication channel such as Controller Area Network (CAN) to rewrite code segments or constants using a bootstrapping algorithm.
Online Serial Programming (ICSP)
Flash DSC allows users to easily upgrade application firmware in the field using a method called "In-Circuit Serial Programming?". This allows the same controller to be reused under different automotive subsystems and different work/environment conditions, as well as allowing software bug fixes, calibrating sensors, and enhanced functionality with minimal overhead and latency.
High resolution analog to digital converter (ADC)
The widespread use of sensors in many automotive subsystems has prompted the need for on-chip ADCs with sufficient speed and resolution to allow for rapid and small changes in input quantities to be measured. This is especially important in closed-loop operation, such as sampling the intake manifold pressure to determine the exact timing of the ignition to produce the optimum torque. An ADC with a resolution less than 12 bits or a nonlinearity error greater than one least significant bit (LSB) cannot meet the needs of most automotive functions. In some subsystems, sampling speed is a key consideration, especially in safety-critical functions such as airbag control. In other cases, the main consideration may be the ability to measure different physical quantities simultaneously. For example, an active suspension system may require simultaneous sampling of vehicle speed, acceleration, body/wheel relative motion, and steering angle. The appropriate DSC device should be selected based on the ADC function required by the module.
Pulse width modulation (PWM)
Some valves and actuators used in automotive systems are controlled by pulses of variable duty cycle. Two common examples of PWM control functions are: a fuel injection valve that opens when the pulse is active to control the amount of fuel injected into the cylinder; and an ignition generator that produces a spark when the pulse drops to a low voltage level. The DSC supports automatic generation of PWM signals with specified waveforms and polarities. Subsystems such as power steering, automatic transmissions, and air conditioning all contain complex motor control algorithms. Some DSCs have a variety of on-chip peripherals to support such advanced PWM algorithms.
Quadrature Encoder Interface (QEI)
Accurate and rapid measurement of the speed and position of the car and its various mechanical components is important to effectively control many aspects of the car's operation. For example, anti-collision systems require measurement of speed and acceleration. A quadrature encoder (such as a photoelectric encoder) is usually selected as the sensor for this measurement. Some DSCs include an internal quadrature encoder interface that effectively decodes the signals produced by the quadrature encoder with minimal software overhead.
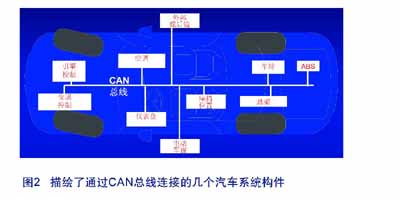
Controller Area Network (CAN)
Since a car contains many processors to perform a wide variety of functions, efficient and reliable communication between different subsystems is important in order to share sensor and control information. Another advantage of communicating between modules is that it eliminates the need to use multiple sensors to make repeated measurements of the same physical quantity, as well as effective monitoring and diagnostics at the system level. For example, the function of battery monitoring, the MCU not only needs to measure the voltage of the battery from time to time, but also sends control signals to various other modules to control their switches, thereby optimizing the use of the battery and ensuring the start of the car. The CAN bus standard is at an important position in the communication standards of automotive networks. Many DSCs include one or more on-chip CAN controllers, making it a natural choice for automotive applications. The use of DSC in automotive networks, with software support for high-level protocols (eg, OSEK-compliant real-time operating systems and CAN application layer implementations), can also implement additional features.
typical application
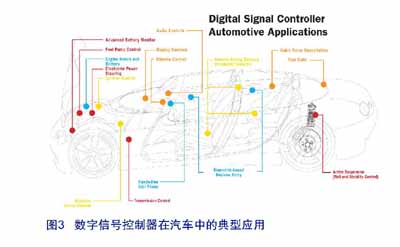
The typical applications of digital signal controllers in automobiles are listed below.
Electronic power steering
Electronic clutch and gearbox control
Anti-rolling and stability control
Cabin noise elimination
Advanced battery monitoring system
Airbag control
Ignition control
Parking sensor
Fuel pressure sensor
temperature control
Engine knock detection
Engine flameout detection
Adaptive navigation control
The fuel cell
In-car entertainment
Car speakerphone kit
Keyless access control based on human biology
in conclusion
As automotive systems become more demanding for functionality, connectivity, and mathematical computing power, 16-bit digital signal controllers such as the Microchip dsPIC30F family will be ideal for processor architectures used in many automotive subsystems. More and more novel and powerful features, including emerging Hybrid technology and fuel cell technology, are rapidly being introduced into the automotive design arena. This further deepens the need for the functionality and diversity of DSCs. The existence of software tools such as OSEK, CAN-based protocol stacks, TCP/IP, and pre-packaged DSP algorithms will further advance the use of such architectures in a wide range of automotive applications.
PZDK series of automatic constant current charge and discharge equipments are specially designed for the battery charging and discharging applied in railway. They are used for the maintenance and capacity verification of storage battery used in locomotive, railway vehicle and generator car, which can improve the service life of the battery and ensure the safe running of locomotives and other railway vehicles.
The main control unit of the equipment is PLC and the HMI (Human Machine Interface) is 7" LCD colorful touch screen. The equipment has varieties of operating modes, and can automatically record and save working status.

Battery Charging And Discharging Equipment
Railway Battery Charger,Charging And Discharging Device,Battery Charge Discharge Device,Electric Pallet Truck Battery Charger
Xinxiang Taihang Jiaxin Electric Tech Co., Ltd , https://www.agvchargers.com