**1. Introduction**
Machine vision, also known as computer vision, is a technology that enables machines to mimic human visual functions, allowing them to perform measurements and judgments instead of relying on human eyes. This field integrates various technologies such as lighting illumination, optical imaging, sensor systems, digital image processing, mechanical engineering, detection and control, video signal processing, computer science, and human-machine interfaces. These are the fundamental building blocks of machine vision systems.
The ability to recognize traffic lights can significantly benefit individuals with color vision deficiencies—approximately 7 to 8% of the global population. This advancement not only helps these individuals drive safely but also supports the development of autonomous vehicles. As a result, it offers substantial economic and social benefits to the automotive and automotive electronics industries, while also addressing a critical gap in international technology standards.
**2. Traffic Light Recognition Method Based on Machine Vision**
2.1. Flow Chart of the Traffic Light Recognition Method
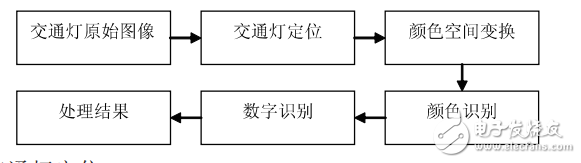
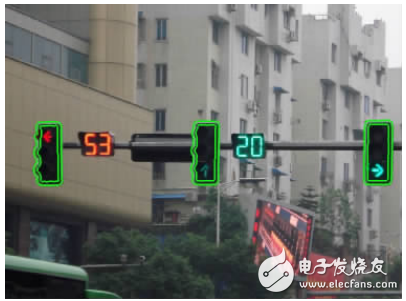
Figure 2-1: Locating the Traffic Light by Shape
2.3. Color Space Conversion Once the traffic light's position is determined, the next step is to identify its color. Since RGB color space may not accurately reflect human perception, we convert the image to HSI (Hue, Saturation, Intensity) color space, which better represents how humans perceive colors. The standard conversion formulas from RGB to HSI are as follows: $$ I = \frac{R + G + B}{3} $$ $$ S = 1 - \frac{3 \cdot \min(R, G, B)}{R + G + B} $$ $$ H = \begin{cases} \theta & \text{if } G \geq B \\ 360^\circ - \theta & \text{if } G < B \end{cases} $$ where $$ \theta = \cos^{-1}\left( \frac{(R - G) + (R - B)}{2 \sqrt{(R - G)^2 + (R - B)(G - B)}} \right) $$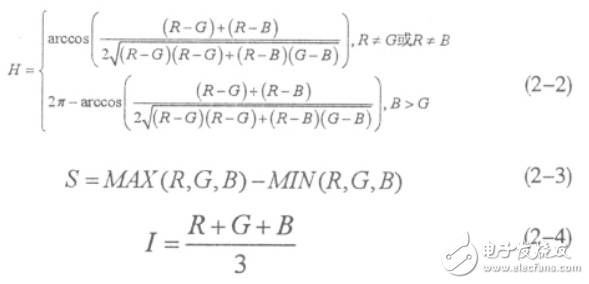
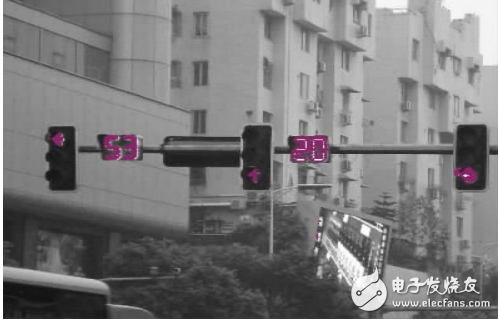
Figure 2-2: Extracting Traffic Light Information via Saturation
2.4. Color Recognition To identify the color of the traffic light, we use image segmentation techniques. After thresholding the image, we extract the desired regions. 2.4.1. Threshold-Based Segmentation This is one of the most common methods for segmenting images. It involves selecting a threshold to separate different regions. For binary images, a single threshold is used, classifying pixels above the threshold as the target and those below as the background. For multi-class images, multiple thresholds are required. The choice of threshold is crucial, and optimal thresholds are often determined based on statistical measures like mean values. Under equal prior probabilities of background and target, the optimal threshold is the average of the background and target gray levels: $$ T = \frac{\mu_{\text{background}} + \mu_{\text{target}}}{2} $$
Steel poles are commonly used to carry several types of electric power lines, distribution lines and lighting system. Distribution lines carry power from local substations to customers. They generally carry voltages from 4.6 to 33kV for distances up to 30 miles, and include transformers to step the voltage down from the primary voltage to the lower secondary voltage used by the customer. A service drop carries this lower voltage to the customer's premises.
LED Lamp,High Brightness LED Lamp,Led Street Bulbs Lamp,LED Wall Lamps
Yixing Steel Pole International Trading Co., Ltd , https://www.yx-steelpole.com