Overview
With the improvement of people's living standards, cars have gradually entered the family, and the requirements for car theft are getting higher and higher. Although the car alarms on the market are gradually improving, these anti-theft devices mainly use call alarms, high-voltage electric shocks, etc. With the development of science and technology, car theft technology is also getting higher and higher, making people's defenses impossible. Car burglar has extremely important research value for both automobile manufacturers and social insurance industry. For the current rising trend of car theft in the world, all car manufacturers are constantly improving the anti-theft technology, especially with microelectronic technology. The progress of car anti-theft technology has been moving towards automation and intelligence.
The GSM format is currently the main system used by mobile phones and accounts for more than 80% of the market. Combining GPS with GSM can not only use GPS technology to globalize the car, but also achieve good navigation. It can also use the wide coverage area and SMS function of the GSM network to enable the owner to know the current state of the car in time, thus improving the overall car. Navigation anti-theft performance.
1 system architecture design
Based on the DSP chip, the block diagram of the vehicle positioning anti-theft function system consisting of the GPS module, the GSM wireless communication module and the necessary auxiliary circuits is shown in Fig. 1. In Figure 1, the DSP is controlled by the serial port for the GPS and GSM modules. The G SM module is connected to the serial port of the DSP itself, and the 8251 is used to expand a serial port for use by the GPS module. Both the detection control and its auxiliary circuits can directly use the I/O port of the DSP. The I/O ports of the DSP chip of the TMS320LF240 are all multiplexed, so it is only necessary to set the information in the control register to make the I/O as a general-purpose I/O. 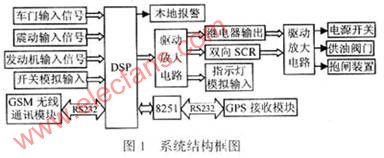
The system with the DSP as the controller will be in the state of constantly receiving the car position information after the startup operation is initialized, and the system is also waiting for the detection state and receiving the interruption of the user inquiry message. Once an interrupt is generated, it will be transferred to the corresponding interrupt handling subroutine. If the system's arming signal is invalid, the control system does not perform the above operation.
After the fortification signal is valid, the DSP mainly processes the position information received by the GPS receiver. Each time a new message mark is obtained, the subroutine is called to perform message processing, mainly to separate useful information such as latitude and longitude, time and checksum, and store the data in a specified storage space. The wireless communication module TC35T also exchanges information through the serial port and the DSP. In this serial port reception, the interrupt is used to obtain the power to use the controller. If there is abnormal condition, such as the door opening under the fortification and the engine start, the interrupt request will be sent to the DSP. In the software, the interrupt caused by TC35T is set to low priority. That is, if the vehicle owner actively queries the message while the vehicle condition is abnormal, the DSP controller will not respond to the TC35T interrupt request.
If the DSP controller receives the interrupt request and determines that the engine start signal is interrupted (it can be delayed for a certain time, such as 100 ms and then detected again, it is still valid to determine that the start signal is valid, thus preventing misoperation). The system will process the engine start interrupt service subroutine, which will send the engine is running to the user (you can also set the number of transmissions). If the owner does not respond in time, it can be sent again every 5 minutes, and the interval is 1 min, each time lasting 30 s local alarm signal; the signal of power failure and fuel cut is immediately effective (two indications in this simulation experiment) The lamp is lit. After 20 s, the brake signal is also valid. At the same time, the processing result and the position information received by the current GPS receiver are sent to the owner through wireless communication. Similarly, if the signal of the left door or the right door is damaged or there is vibration, the processing method is similar except that the content of the short message sent to the owner is different.
When the user's mobile phone sends a check status message requesting the control system to return to the current state, the control system will respond differently according to the current state of the system: when not in the armed state, the control system is still not armed (defen ses The short message of isnt it set) is given to the user; when in the armed state, the system is in good condition and sends a short message with good status (all is ok) to the user. If the system has been damaged, the corresponding treatment measures have been taken, such as first locking the car, then the engine is locked short message to the user, and the further processing method will be sent to the user at the same time. To unlock, you need to send a certain password and send unlock information to the control system to unlock it effectively. Other situations are handled in a similar manner.
2 System feasibility analysis
2.1DSP technology
DSP has extremely high speed digital processing power and a large amount of computation. Therefore, it can meet the requirements of efficient real-time signal processing. The features of this new device are as follows:
(1) Adopting the Harvard (HARVARD) structure, the highly parallel operation greatly increases the computing speed;
(2) One or more hardware multipliers and accumulators are arranged in the chip, which can realize single instruction multiplication, addition operation and index operation;
(3) Special instructions with strong functions are specially set in the chip, which can realize overlapping operation of instructions;
(4) A variety of peripheral devices and interfaces with strong functions are set in the chip, so that the computing speed is many times faster than that of the PC;
(5) DSP adds hardware loop control when the loop initialization is completed. The actual running cycle no longer consumes the instruction cycle. Greatly improve the computing speed of digital signal processing;
(6) DSP costs are low and sales prices are decreasing year by year.
In the field of DSP, Texas (TI) products and their supporting technologies and development tools are currently widely used in the market. The TMS320LF240 used in this article is one of the TMS320C24x series. TMS320LF24x, also known as DSP controller, is a cost-effective 16-bit fixed-point DSPs introduced by TI in 1997. It is designed for motors, inverters, robots, CNC machine tools and other controls.
Since the current research is still in the simulation stage, the signal for detecting the vehicle condition is triggered by the switch, and the response to the vehicle condition signal is judged by whether or not the indicator light is lit, so the circuit outside the board is relatively simple. The DSP controller controls the GPS receiver module and the wireless communication module GSM through the serial port, while the TMS320LF240 has only one serial port, so the serial port needs to be extended. In addition, the monitoring status is triggered by the interrupt to trigger the DSP control function. The TMS320LF240 has only three external maskable interrupt sources, so the external interrupt needs to be extended. Other ports that are used can be set to general I/O ports.
2.2 Basic Principles of GPS
The United States began to build Global Positioning System GPS in 1973 and was fully operational in 1994. The Global Positioning System (GPS) consists of three segments: a GPS satellite constellation, a ground control/surveillance network, and user receiving equipment. The user equipment is mainly a satellite signal receiver, which has different positioning capabilities according to different purposes. The basic function is to receive the L1 carrier, separate the C/A code, and perform the simplest virtual distance location, which is also a general vehicle positioning station. The model used. It must be noted that the GPS satellite generates two different carriers to carry all the codes and messages, wherein the C/A code is only set on the L1 carrier, and the P code is respectively set on the L1 and L2 carriers, and the difference is P1 and P2 codes. The functional block diagram of the GPS receiver module used by the general user is shown in Figure 2. It mainly consists of a frequency receiving processing circuit and a signal processor. In order to save the recent location information, the program memory and data memory are added at the same time, and the I/O interface includes the serial port and the general data port for direct use by the user. 
2.3 GSM short message service
The GSM system can provide two major services, namely basic services and supplementary services. The basic services include telecommunication services and bearer services; supplementary services are not provided separately and are complementary to basic services. The telecommunications services provided by GSM include telephone, short message and fax. The short message service is the only service in the GSM system that does not require the establishment of an end-to-end service path. Even if the mobile station is in full circuit communication, short message transmission can be performed, that is, the transmission of a message constitutes a communication.
The TC35T wireless GSM communication terminal used is a Siemens company that integrates the necessary interfaces on the wireless module TC35. The TC35T module is used as a transmitting and receiving device to realize the exchange of vehicle position information and monitoring control information between the owner and the onboard control by using short message transmission. This method has the advantages of low communication cost, high spectrum utilization, large system capacity, multiple types of services, good security performance, strong anti-interference ability, high call quality, automatic roaming, etc. It uses signaling channel transmission without dial-up connection. Directly sending the information to be sent plus the destination address to the short message service center, and then sending it to the final sink by the short message service center is a widely used communication solution. 
3 Conclusion
In this paper, the combination of car positioning and anti-theft functions is considered. There is no duplication in the installation of the equipment. At the same time, the anti-theft and positioning are improved to the level of intelligence, and the foundation for network development is also laid. DSP and As a controller, the TMS320LF240 series has many advantages that other controllers do not have.
This article refers to the address: http://
Lead Acid Battery,2V 3000Ah Lead Acid Battery,L Series Battery,H Series Battery
Wolong Electric Group Zhejiang Dengta Power Source Co.,Ltd , https://www.wldtbattery.com